Borsti
Der ferngesteuerte Bürstenroboter des AATiS e.V. (AS104)

Borsti ist der ferngesteuerte Bürstenroboter des Arbeitskreis Amateurfunk und Telekommunikation in der Schule e.V. (AATiS) und eignet sich unter anderem ideal für Elektronikeinsteiger sowie technikbezogenen Schulunterricht (MINT).
Er basiert auf einem ähnlichen Prinzip wie es Windell H. Oskay für seinen Bristlebot vorgestellt hat, wurde jedoch auf zwei Bürsten erweitert um den Roboter lenkbar zu machen.
Borsti verfügt über Beleuchtung, Blinker, Blitzlicht und Hupe und kann über die beiliegende Infrarotfernbedienung bedient werden. Optional kann zur Steuerung mittels Android App ein Bluetooth Modul nachgerüstet werden.
Die doppelseitige Platine wird (abgesehen vom Blitzlicht, welches eine SMD LED in der Bauform 1206 ist, und dem optionalen Bluetooth-Modul) ausschließlich mit bedrahteten Bauteilen bestückt. Infrarotfernbedienung, Motoren, Batteriehalter, Schalter, Abstandsbolzen, Schrauben und Unterlegscheiben liegen dem Bausatz bei, die Mechanik muss jedoch selbst angefertigt werden.
Der Bausatz ist unter der Nummer AS104 beim AATiS erhältlich, die Beschreibung ist im Praxisheft 24 erschienen. Ergänzend zum Heftbeitrag sind auf dieser Seite noch einige zusätzliche Informationen zu finden.
Meet Borsti
08. November 2014: Borsti wird auf der 33. Interradio Hannover am Stand des AATiS ausgestellt. Auch der Bausatz kann vor Ort erworben werden!05. Juli 2014: Vortrag auf der Maker Faire Hannover, 11:00 - 11:30 in Konferenzraum 08/1027.-29. Juni 2014: Borsti wird auf der HAM RADIO in Friedrichshafen am Stand des AATiS ausgestellt. Auch der Bausatz kann vor Ort erworben werden!14.-16. März 2014: Workshop auf dem 29. AATIS Bundeskongress in Goslar
Fehlende und optionale Bauteile
- Grundplatte, Motorhalteplatte, Unterlegplatte: Aus FR4 Material nach Vorlage (s.u.) aussägen
- Bürsten: Baumarkt, nach Anleitung im Heft zersägen
- Bluetooth-Modul: eBay o.ä. (Details im Praxisheft)
- Acrylglashalbkugel: In jedem gut sortierten Bastelladen erhältlich
- Befestigung der Kugel: Winkel aus dem Elektronikbedarf, M3 Schrauben
- Verzierung: ggf. Wackelaugen sowie flauschigen Stoff als Haar
Mechaniksatz
Teilnehmer des Workshops auf dem AATiS Bundeskongress am 14.-16. März 2014 in Goslar hatten die Möglichkeit, einen limitierten Mechaniksatz bestehend aus gefräster Grundplatte, Motorhalte- und Unterlegplatten, Bürsten und Winkeln zu erwerben.

Aufgrund der hohen Nachfrage wurden weitere Mechaniksätze gefertigt. Diese kosten 10 Euro und sind wie gewohnt über den AATiS zu beziehen.
Android App
Die Android App ist im Google Play Store unter dem Namen "Borsti Remote" bzw. einer Suche nach "de.maltepoeggel.borstiremote" zu finden.
Alternativ führt ein Klick auf das nebenstehende Logo direkt zu Google Play. Die App ist selbstverständlich völlig kostenlos!
Richtungskorrektur
Damit Borsti sich optimal geradeaus fahren lässt, ist es nötig die Bürsten möglichst exakt auszurichten und vorzubohren. Im Normalfall schließen die Kanten beider Motoren mit der Halteplatte ab. Geringes abdriften kann durch leichtes Verschieben eines Motors nach innen korrigiert werden. Die Ausrichtung sollte auf einem geraden, glatten Untergrund (Tischplatte, Laminat, PVC) vorgenommen werden. Gegebenenfalls vorher die Wasserwaage anlegen.
Anmerkung zum Aufbau
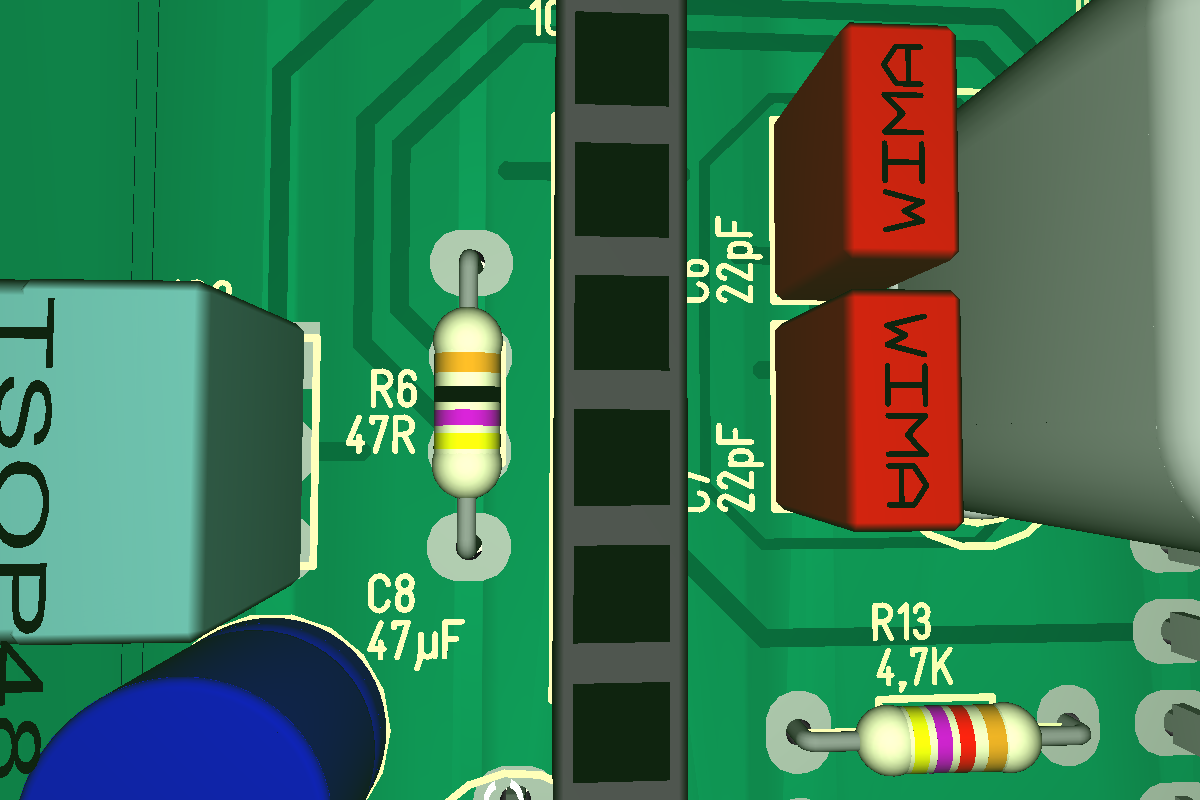
Fragen kamen beim Bestücken von R6 (47 Ohm) auf. Unter diesem befinden sich zwei Durchkontaktierungen, die dieselbe Größe wie normale Pads haben. Dies ist etwas verwirrend.
Die Anschlüsse dieses Widerstandes müssen wie im Bild ersichtlich mit den beiden äußeren Pads verlötet werden!
Schaltungsänderung bei Betrieb ohne Bluetooth-Modul
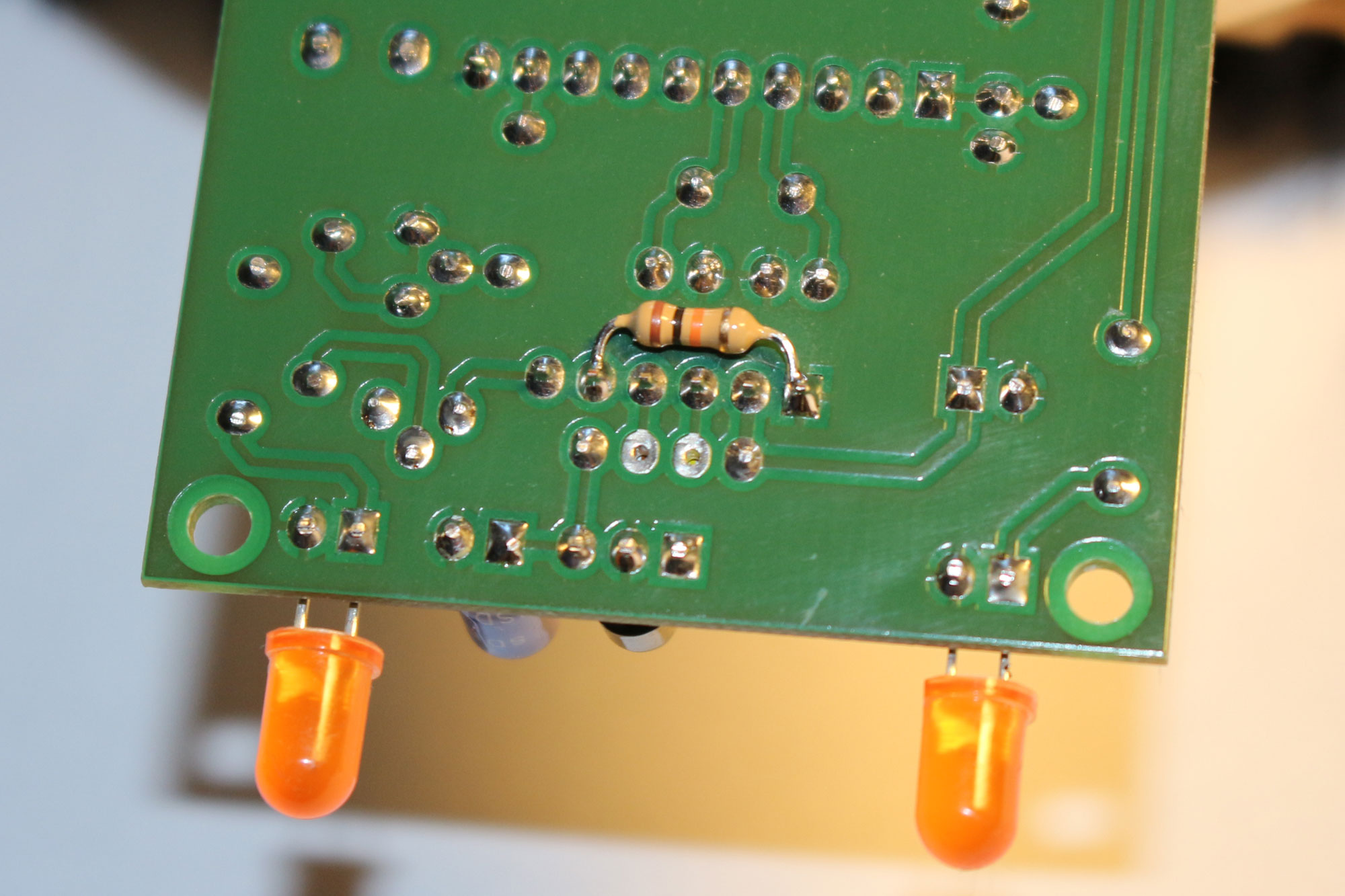
Ist kein Bluetooth-Modul verbaut, so kann es zu einem Problem kommen: Borsti startet im Bluetooth-Konfigurationsmodus, obwohl der Taster beim Einschalten nicht gedrückt wird. Dieses äußert sich dadurch, dass nur die orangen LEDs aufleuchten und der Roboter nicht auf die Fernbedienung reagiert.
Abhilfe schafft ein Widerstand zwischen 4,7K und 10K, welcher von Masse (Pin 1, eckiges Lötpad) nach PD4/KEY (Pin 5) am Steckverbinder angelötet wird. Dies verhindert statische Aufladungen des Portpins und somit eine Fehlerkennung des nicht gedrückten Tasters.